



matlab robotic toolbox工具坐標(biāo)系下的雅可比矩陣 
je0=robot.jacob0(q);je0=subs(je0,[cos(alp1),sin(alp1),cos(alp4),sin(alp4),cos(alp5),sin(alp5)],[0,1,0,1,0,-1]);je0=simplify(je0);je=robot.jacobe(q); %空間雅可比,即空間固定坐標(biāo)形下的雅克比矩陣,參考現(xiàn)代機(jī)器人學(xué)5.1.1je=subs
2650
余俊煒 ??? 3年前
Matlab在半導(dǎo)體行業(yè)應(yīng)用計算特點與計算設(shè)備硬件配置推薦 
在使用Parallel Computing Toolbox的情況下,可以使用MATLAB的并行計算功能實現(xiàn)多核并行計算。 目前,MATLAB在半導(dǎo)體工具箱方面尚未提供直接的GPU加速支持。但是,可以利用MATLAB的GPU編程功能和GPU Computing Toolbox來編寫并執(zhí)行特定半導(dǎo)體計算任務(wù),以加速計算過程。
2183
UltraLAB ??? 2年前
Matlab神經(jīng)科學(xué)應(yīng)用工具箱計算特點與計算設(shè)備硬件配置推薦 
在神經(jīng)科學(xué)方面,Matlab有幾個常用的工具箱可用。以下是一些常見的工具箱及其主要應(yīng)用: No 工具箱名稱 功能說明 1 Signal Processing Toolbox 用于處理和分析神經(jīng)信號,例如腦電圖(EEG)和腦磁圖(MEG)等。
2136 1
UltraLAB ??? 2年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
'view',[40 31],'delay',0.001,'trail',{'r','LineWidth',4},'nowrist') %顯示三維動畫Animate: saving video --> CartesianSpace_2022-05-01-15-29.gif with profile 'GIF'Loading STL models from ARTE Robotics Toolbox
2121
余俊煒 ??? 3年前
并聯(lián)機(jī)械手爪運動學(xué)分析 
2.4.3 基于Robotics Toolbox的工具箱的模型檢測 上文中,我們已經(jīng)對采摘機(jī)器手爪運動學(xué)理論模型進(jìn)行了創(chuàng)建,接下來要用MATLAB軟件中的機(jī)器人工具箱對創(chuàng)建好的采摘機(jī)器手爪運動學(xué)理論模型進(jìn)行校驗。 2.4.4 對象模型創(chuàng)建 運用MATLAB軟件的Link函數(shù)將上文采摘機(jī)器手爪已確立的主要參數(shù)代入完成整個模型建模。
2284
余俊煒 ??? 2年前
六自由度機(jī)械臂雅可比矩陣與力矩計算(matlab代碼) 
STL models from ARTE Robotics Toolbox for Education by Arturo Gil (http://arvc.umh.es/arte).......
2518
余俊煒 ??? 3年前
三自由度機(jī)械臂運動學(xué)分析+仿真 
通過matlab 計算,寫出機(jī)器人末端位置。
3991
余俊煒 ??? 2年前
六軸機(jī)械臂(帶抓手)運動學(xué)分析+軌跡規(guī)劃 
通過matlab 計算,寫出機(jī)器人末端位置。
5213 1
余俊煒 ??? 2年前
六自由度機(jī)械臂五次多項式軌跡規(guī)劃(Fivejtraj_Function自編寫函數(shù)) 
'view',[24 30],'trail',{'r','LineWidth',3.5}) %顯示三維動畫Animate: saving video --> JointSpace.gif with profile 'GIF'Loading STL models from ARTE Robotics Toolbox for Education by Arturo Gil (http://arvc.umh.es
2603
余俊煒 ??? 3年前
[機(jī)器人學(xué)習(xí)]-樹莓派6R機(jī)械臂運動學(xué)分析 ![[機(jī)器人學(xué)習(xí)]-樹莓派6R機(jī)械臂運動學(xué)分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
通過matlab 計算,寫出機(jī)器人末端位置。
2561 1
余俊煒 ??? 3年前
五自由度機(jī)械臂運動學(xué)分析(三轉(zhuǎn)動+兩移動自由度) 
通過matlab 計算,寫出機(jī)器人末端位置。
3035
余俊煒 ??? 3年前
巖體不連續(xù)提取工具---Discontinuity Set Extractor (DSE) 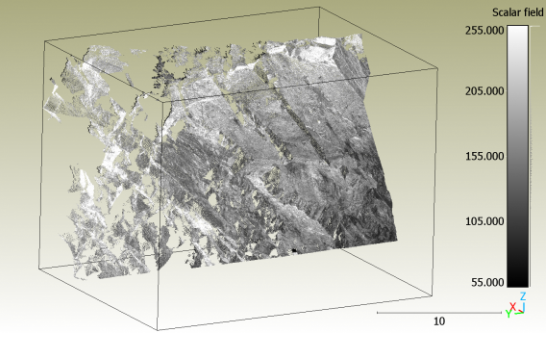
DSE使用了MATLAB的兩個工具箱(toolbox),一個是Computer Vision Toolbox (CVT),可以對3D點云進(jìn)行快速的可視化;另一個是Statistics and Machine Learning Toolbox (SMLT),SMLT使用了dbscan功能,一種機(jī)器學(xué)習(xí)的聚類算法,我們在自然語言處理中曾經(jīng)使用過dbscan算法【BERT模型的應(yīng)用回顧(階段性總結(jié));BERTopic
3737 1 1
計算巖土力學(xué) ??? 3年前
自主水下航行器 (AUV) | 近實時仿真與控制助力實現(xiàn)水下機(jī)動航行 
◆ ◆ ◆ ◆ 文章來源MATLAB
3067 3 2
泡沫oO ??? 2年前
基于精準(zhǔn)碰撞檢測算法的機(jī)械臂避障軌跡規(guī)劃 
仿真實驗本文采用MATLAB 進(jìn)行實驗仿真,主要使用MATLAB Robotics Toolbox工具箱和優(yōu)化工具箱進(jìn)行機(jī)械臂避障仿真實驗。首先通過MATLAB Robotics Toolbox工具箱建立兩桿六自由度機(jī)械臂模型,設(shè)置兩連桿的長度分別為 L1=L2=5?cmL1=L2=5?cm。
3495 6 3
機(jī)械設(shè)計師 ??? 4年前
來自劍橋Martínez-Pa?eda 多尺度 斷裂 應(yīng)變梯度的文章和源代碼(UEL, CMSG等)
Acta Materialia, 105: 9-16 (2017) 源代碼見附件 ———————————————————————————————————————————— (七)ABAQUS2MATLAB: A SUITABLE TOOL FOR FINITE ELEMENT POST-PROCESSING A toolbox to connect Abaqus and
5071 16 15
藍(lán)牙 ??? 6年前
#二維(2d)和三維(3d)voronoi(泰森多邊形)(映射網(wǎng)格)生成插件 
里面的Multi-Parametric Toolbox(MPT)工具箱賦有的 mpt_voronoi函數(shù)命令,生成帶有拓?fù)湫畔⑶揖哂兄付ù笮『途Я?shù)目的三維Voronoi多晶體示意圖。
4112 22 2
沉澱 ??? 7年前
巖爆預(yù)測文獻(xiàn)回顧(Prediction of Rock Burst) (4) [2001-2005] ![巖爆預(yù)測文獻(xiàn)回顧(Prediction of Rock Burst) (4) [2001-2005]](https://img.jishulink.com/202110/imgs/400c957c3bdf461ab057166a73a8f89b?image_process=resize,fw_294,fh_172,)
Lu(2003) <A model for predicting rock burst by MATLAB neural network toolbox> 使用巖體最大切向應(yīng)力與巖體單軸抗壓強(qiáng)度之比、巖體單軸抗壓強(qiáng)度與巖體單軸抗拉強(qiáng)度之比、沖擊性指數(shù)等作為巖爆的判斷指標(biāo),建立了巖爆預(yù)測的神經(jīng)網(wǎng)絡(luò)模型。
2637
計算巖土力學(xué) ??? 4年前
深度 一張圖看懂CAE軟件家譜(轉(zhuǎn)載) 
44FEMLAB 最初版本是集成于MATLAB 軟件中的一個專業(yè)有限元工具包,目前的最新版本FEMLAB 3.0 已完全獨立成一套功能強(qiáng)大的軟件,并可與MATLAB 中的Toolboxes 及Simulink 無縫結(jié)合。
2962 88 2
琳泓comsol ??? 7年前
基于相位補(bǔ)償方法的天線增益提高 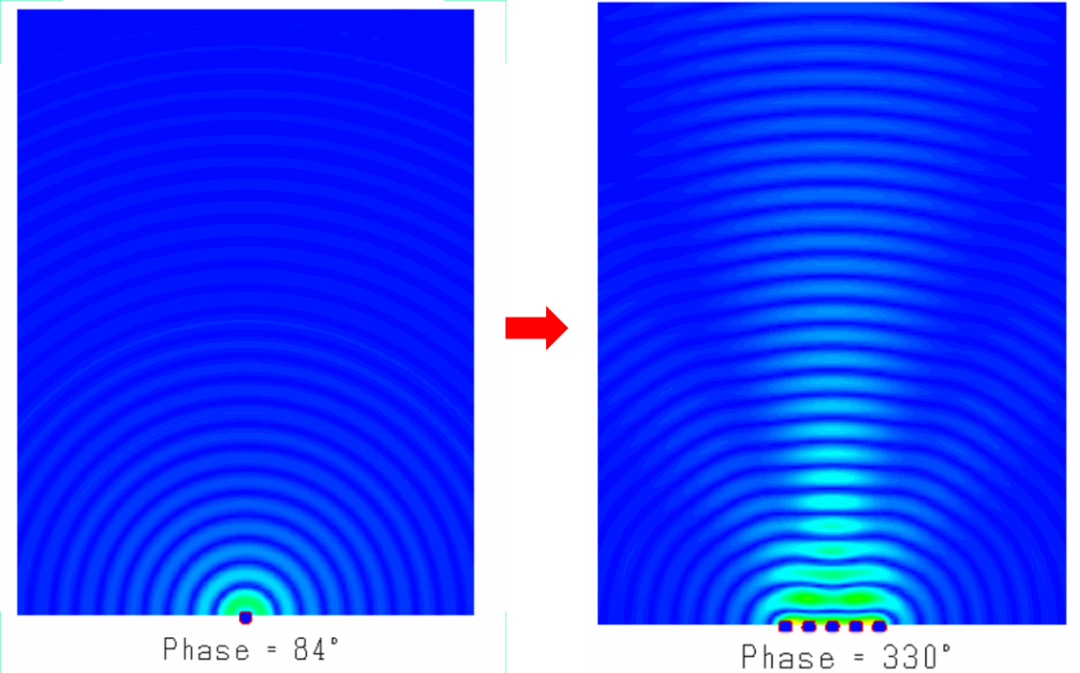
%% 建立相位梯度表面%1)讀取單元位置和尺寸分布isunitflg%2)結(jié)合feko圓面建模API,建立內(nèi)圓陣列%% clc;clear all;%% 添加路徑addpath('C:\Users\liubing\Desktop\Radome_toolbox(公開)\相位梯度表面建模(公開)\FEKO_matlab_API');%接口函數(shù)路徑filepath='C:\Users\liubing
4040 2
萬有引力LYQ ??? 2年前
增強(qiáng)現(xiàn)實場景下基于穩(wěn)態(tài)視覺誘發(fā)電位的機(jī)械臂控制系統(tǒng) 
控制主機(jī)安裝Ubuntu16.04系統(tǒng)和機(jī)器人操作系統(tǒng)(Robot Operating System,ROS)。機(jī)械臂的驅(qū)動程序和運動控制程序均部署在ROS上。在ROS中,除了機(jī)械臂原有的節(jié)點外,還包括AR-BCI系統(tǒng)發(fā)布的節(jié)點,用于向機(jī)械臂發(fā)送控制命令及接收機(jī)械臂狀態(tài)信息。
2576 1
機(jī)械設(shè)計師 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
